Source: OpenAI’s DALL·E 2 with prompt “a hyperrealistic picture of a robot reading the news on a laptop at a coffee shop”
Welcome to the 5th edition of Robo-Insight, a robotics news update! In this post, we are excited to share a range of new advancements in the field and highlight robots’ progress in areas like human-robot interaction, agile movement, enhanced training methods, soft robotics, brain surgery, medical navigation, and ecological research.
New tools for human-robot interaction
In the realm of human-robot interactions, researchers from around Europe have developed a new tool called HEUROBOX to assess interactions. HEUROBOX offers 84 basic and 228 advanced heuristics for evaluating various aspects of human-robot interaction, such as safety, ergonomics, functionality, and interfaces. It places a strong emphasis on human-centered design, addressing the vital connection between technology and human factors. This tool aims to facilitate seamless collaboration between humans and robots in industrial settings by ensuring robots align with human capabilities and needs, emphasizing productivity and well-being.
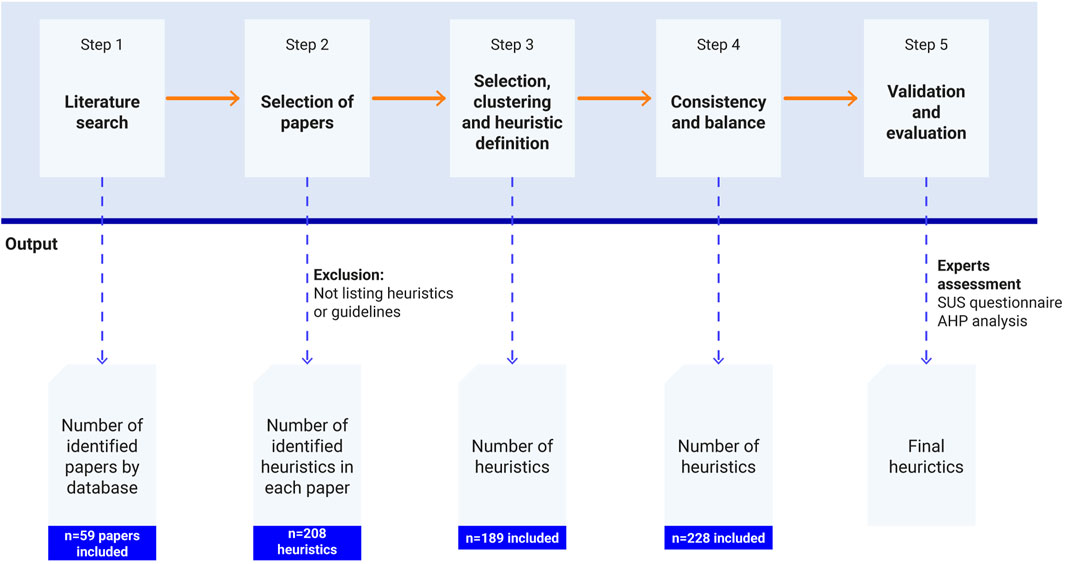
Approach for creating a novel method to assess Human-Robot Interaction (HRI) heuristics. Source.
Innovations for enhanced control in agile robotics
Shifting our focus to agile robots, researchers from Zhejiang University have designed a cable-driven snake-like robot for efficient motion in confined spaces. This robot utilizes force transducers and angle sensors to achieve precise dual-loop control. By combining pose feedback from angle sensors and force feedback from transducers, this control strategy enhances the robot’s accuracy and ensures cable force and stiffness, guaranteeing stability and reliability during motion. This innovation has significant potential for various applications, including minimally invasive surgery, nuclear waste handling, in-space inspections, and search and rescue operations in complex environments. The robot’s design and control strategy promises advancements in high-precision robotic systems for engineering applications.
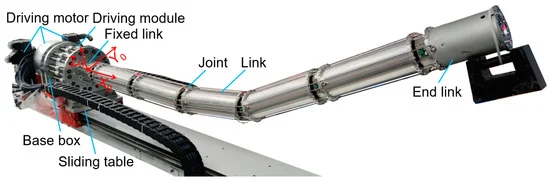
CSR Overview. Source.
Better training methods in agile robotics
Keeping within the field of agile robotics, researchers from the University of Zurich have recently pushed the boundaries of this type of robots, focusing on the pivotal role of control systems within them. Their investigation pitted two key methodologies against each other: model-based optimal control (OC) and reinforcement learning (RL). Surprisingly, RL, which enables robots to learn through trial and error, triumphed in a demanding real-world test: autonomous drone racing. Not only did RL outperform but surpassed human capabilities, with the agile drone achieving an astonishing peak acceleration, exceeding 12 times gravitational acceleration, and a remarkable top speed of 108 kilometers per hour. These results illuminate the promising future of agile robotics, where learning-centric approaches like RL pave the way for more efficient control and performance in diverse applications.

The visual progression shows a fast-racing drone being controlled by the RL strategy over time. Source.
New strong and stiff soft robots
Changing our focus to the world of soft robotics, recently researchers from Kangwon National University have presented a soft gripper robot with the ability to vary its stiffness, addressing a major challenge in the field of soft robotics. Unlike complex designs, this gripper achieves stiffness variation through a straightforward mechanism involving pneumatic control and tendons actuated by stepper motors. This innovation allows the gripper to adapt to objects of various shapes, sizes, and weights, expanding its potential applications. The study demonstrates that this gripper can increase its stiffness by up to 145% and handle weights of up to 2.075 kg. Soft robotics, inspired by natural organisms, holds promise in healthcare, manufacturing, exploration, and other fields, and this research contributes to its advancement.
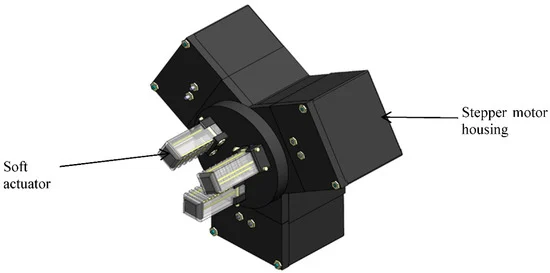
CAD design of gripper mechanism. Source.
Enhanced brain surgery robots
Turning our focus to the medical robotics world, researchers from Harvard Medical School have developed a robotic device poised to enhance neurosurgery by making it less invasive. The team introduced a novel two-armed joystick-controlled endoscopic robot designed to mimic the dexterity of open surgery but with smaller incisions. This innovation was put to the test in the context of brain tumor resection, a typically invasive procedure. Compared to conventional manual endoscopic tools, the robot offered greater access to the surgical site, enabling bimanual tasks without brain tissue compression, and often completing tasks more swiftly. These findings open the door to the potential transformation of traditionally open brain surgeries into less invasive endoscopic procedures.
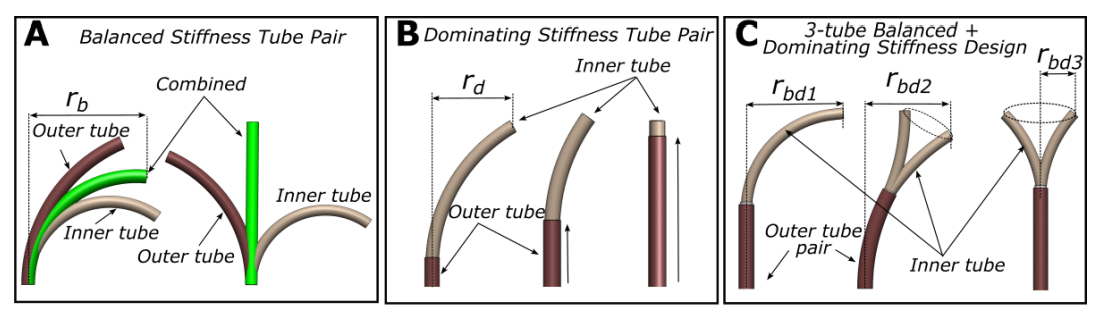
Robotic tube arms with varying degrees of stiffness. Source.
An advanced robotics needle
Along the same lines as medical robotics advancements, a team of researchers led by Professor Ron Alterovitz at the University of North Carolina at Chapel Hill has developed an autonomous robotic needle designed to navigate through intricate lung tissue while avoiding obstacles and important lung structures. The needle uses AI and computer vision to autonomously travel through living tissue, making it a potentially valuable tool for precise medical procedures like biopsies and targeted drug delivery. This development represents a significant step in the field of medical robotics, offering improved accuracy and safety in minimally invasive procedures. The researchers plan to further refine the technology and explore additional medical applications.
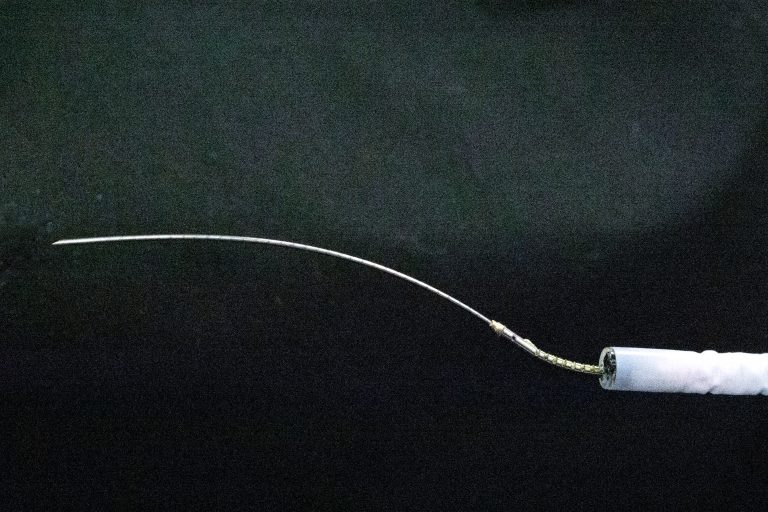
The robotic needle emerging from a bronchoscope. Source.
Robots could bee the key to ecological research
Finally, in the ecological field, robotics researchers from Durham University are teaming up with experts from various disciplines to investigate how animals are adapting to ecological challenges, with the aim of mitigating global biodiversity loss. Leading the RoboRoyale project, Dr. Farshad Arvin combines miniature robotics, artificial intelligence, and machine learning to develop robotic bees. These robotic bees are designed to interact with honeybee queens, enhancing their egg-laying and pheromone production, which influences hive behavior. This unique project focuses exclusively on queen bees, using a multi-robot system that learns over time how to optimize their well-being. Simultaneously, the MammalWeb project collects camera trap images to monitor the habits and behaviors of UK mammals, addressing the impact of climate change and human activities on biodiversity. These initiatives represent groundbreaking contributions from the robotics community to ecological research.
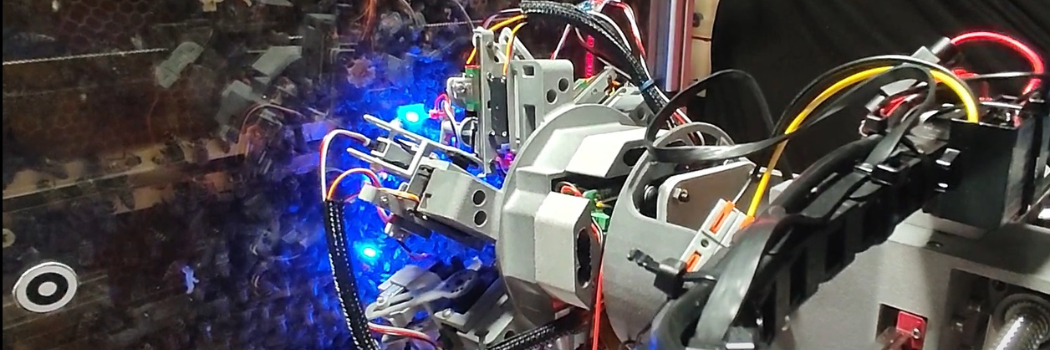
A robotic development device. Source.
The continuous evolution across various sectors underscores the adaptable and consistently progressing nature of robotics technology, revealing new opportunities for its integration into diverse industries. The gradual growth in the field of robotics reflects sustained dedication and provides insight into the potential implications of these developments for the future.
Sources:
- Apraiz, A., Mulet Alberola, J. A., Lasa, G., Mazmela, M., & Nguyen, H. N. (2023, August 16). Development of a new set of heuristics for the evaluation of human-robot interaction in industrial settings: Heuristics Robots experience (HEUROBOX). Frontiers.
- Xu, X., Wang, C., Xie, H., Wang, C., & Yang, H. (2023, September 4). Dual-loop control of cable-driven snake-like robots. MDPI.
- Song, Y., Romero, A., Matthias Müller, Koltun, V., & Davide Scaramuzza. (2023). Reaching the limit in autonomous racing: Optimal control versus reinforcement learning. Science Robotics, 8(82).
- Mawah, S. C., & Park, Y.-J. (2023, September 11). Tendon-driven variable-stiffness pneumatic soft gripper robot. MDPI.
- Price, K., Peine, J., Mencattelli, M., Yash Chitalia, Pu, D., Looi, T., Stone, S., Drake, J. M., & Dupont, P. E. (2023). Using robotics to move a neurosurgeon’s hands to the tip of their endoscope. Science Robotics, 8(82).
- Autonomous Medical Robot Successfully Steers Needles Through Living Tissue. (n.d.). Computer Science. Retrieved September 23, 2023
- University, D. (n.d.). Computer Science research to build robotic bees and monitor mammals – Durham University. Www.durham.ac.uk. Retrieved September 23, 2023
Source: Robonhub
Source Link: https://robohub.org/robo-insight-5/